Martin Pecka: Robotičtí záchranáři jedou na open-source
Základem robota je počítač, který je doplněn o senzory pro zjišťování informací o prostředí a také aktuátory pro interakci s okolím. Vznikne tím trojice: think, sense a act. Pokud bychom chtěli, aby si spolu roboti vyměňovali informace, můžeme přidat ještě komunikační rozhraní. Když si budou roboti vyměňovat informace o svých záměrech, mohou spolupracovat efektivněji.
Americká organizace DARPA se snaží zajistit, aby americké firmy nebyly zaskočeny pokrokem v jiné zemi. Vypisuje proto soutěže, ve kterých hledá aktuální možnosti v oblasti robotiky. Před několika lety byla vyhlášena soutěž DARPA Subterranean Challenge, ve které se testovalo, jak jsou roboti schopni prozkoumat neznámý podzemní prostor. Bylo potřeba se v neznámém prostoru zorientovat a najít v něm umístění konkrétních artefaktů.
Použití skutečných robotů je velmi složité, proto DARPA paralelně provozovala také simulovanou variantu, ve které bylo možné natrénovat třeba koordinační algoritmy. Můžeme si vyzkoušet mnohem lépe, co by se stalo, že by třeba tři roboti prozkoumávali jednu slepou uličku a podobně.
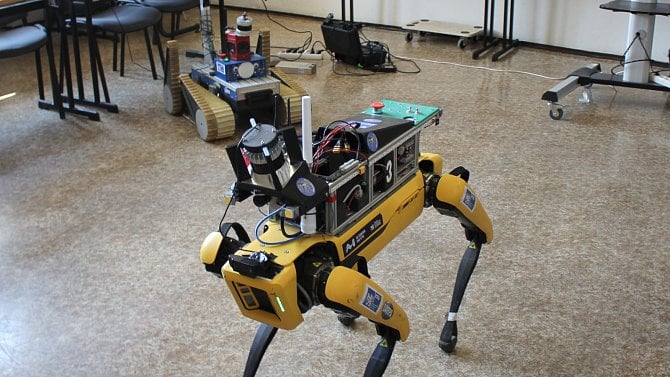
Každý robot musí obsahovat senzory pro průzkum svého okolí. Takovým může být například LIDAR, sada synchronizovaných kamer nebo kamery RGBD, které jsou schopny měřit i vzdálenost. Nevýhoda je, že je to velmi nepřesné a na některých površích to vůbec nefunguje, třeba na hladkých zdech.
Dalším důležitým senzorem je senzor polohy, který umožňuje určit zrychlení, úhlovou rychlost a magnetické pole.




Výpočetní jednotku může tvořit běžný počítač, v tomto případě Intel NUC, který je doplněn o výkonnou grafickou kartu Nvidia Jetson Xavier AGX. Je to také grafická karta s největším množstvím paměti, jinou kartu s 32 GB paměti jsme nikde neviděli.
Pro základní komunikaci s robotem se používají AirMax od Ubiquity, roboti mohou komunikovat také pomocí komerční mash sítě nebo vlastním rádiem na nízkém pásmu. Tam se rychlost pohybuje ve stovkách kilobitů, ale jsme schopni komunikovat i ve velmi členitém prostoru. Robot nám umí nahlásit, že našel artefakt. Sice nám nepošle fotku, ale alespoň víme, kde je a že se může vrátit.
V soutěži DARPA se podařilo prozkoumat řádově stovky metrů podzemí a najít desítky artefaktů. Podmínkou bylo nutné orientovat se s přesností pěti metrů.
Informace se pak musejí přenést operátorovi, který musí detekci vyhodnotit jako správnou.
K řízení robotů se používá Robot Operating System (ROS), což je svobodný framework běžící nad různými operačními systémy. ROS je k dispozici pod licencemi BSD, MIT a Apache. Jeho nejsilnější vlastností je meziprocesorová komunikace. K dispozici jsou definovaná datová rozhraní, mezi kterými je možné vyměňovat data.
Umí zpracovávat živá data, ale i záznamy. ROS nabízí také spoustu kvalitních vizualizačních nástrojů.
ROS běží nejlépe na Ubuntu 20.04, podporovány jsou ale i další distribuce jako Debian nebo Fedora. Toto platí pro současný ROS 1, ale vývojáři už pracují na ROS 2, který v následujících letech nahradí současné prostředí. Vyvíjí se několik posledních let, já bych ho zatím ale ještě nepoužíval.
Zatím ještě nová verze nepodporuje všechny vlastnosti. ROS 1 ovšem nevyhovuje požadavkům průmyslového nasazení, protože některé jeho části zbytečně využívají nestandardní řešení.
David Jenne: Vaše Wi-Fi ví, kde bydlíte
Slovo Wardriving vzniklo z filmu Wargames, kde hlavní hrdina provolává všechna telefonní čísla a zjišťuje, jestli za nimi není modem. Dnes se snažíme objevovat Wi-Fi sítě. Sbíráme hlavně název sítě a polohu na GPS.
Sběr informací je pasivní, jinak by se nejednalo o Wardriving.
Historicky se používaly různé handheldy, PDA a podobně. Dnes se používají běžné mobily s Androidem nebo notebook s Linuxem. Uživatelé si staví i různá zařízení s Raspberry Pi, Intel NUC a podobně.
Je možné postavit si i specializovaný rig, který může mít více síťových karet a vše potřebné je zabaleno v jedné krabici.
V Linuxu je možné použít nástroj Kismet, který má širokou podporu hardware, umí zobrazovat informace v živém čase a může běžet v režimu klient-server. Pokud máte levný router s OpenWRT, můžete na něm jen sbírat data a posílat je vzdáleně na výkonnější server.
Použití je velmi jednoduché, Kismet se nachází v repozitářích linuxových distribucí a má pohodlné webové rozhraní. Kismet si sám spravuje Wi-Fi karty, není potřeba na nich nijak nastavovat monitoring, všechno se nastaví samo.
Pro nejjednodušší použití stačí zavolat kismet -c wlan1.
V Androidu je možné použít aplikaci WiGLE, která podporuje i starší Androidy, takže je možné použít i starý telefon. Data je pak možné nahrát na Wigle.net, kam už od roku 2001 uživatelé posílají data z různých skenů po celém světě. Server pak sám provádí triangulaci a je možné si prohlížet i všechny historické záznamy. Vyhledávat je možné podle MAC adresy nebo SSID, tedy názvu sítě. V databázi je zaznamenáno už téměř 900 milionů sítí, od 371 tisíc různých uživatelů.
Existuje například skript Probe-Hunter, který ze vzduchu zachytává probe requesty, což jsou požadavky na kontakt domácí sítě. Váš telefon vykřikuje SSID vaší sítě, což je normálně vidět v režimu monitoring.
Pokud je název sítě dostatečně unikátní, je možné jej najít v databázi Wigle a zjistit, kde uživatel konkrétního telefonu bydlí.
Adam Hořčica: Pod pokličkou RFID
Při zkoumání RFID je velmi těžké začít, protože na první pohled není vůbec jasné, co je která karta zač. Obvykle je tam logo provozovatele, ale to je na hony vzdálené tomu, kdo kartu vyrobil.
Někdy bývá na kartě logo výrobce, což ale ne zase někdo, kdo čip skutečně vyrobil, ale ne ten, kdo vytvořil konkrétní aplikaci, která na čipu běží. Zároveň většina výrobců nabízí celou řadu různých karet a čipů.
Existují tři základní kategorie RFID tagů, které se liší podle frekvence, na které se komunikuje. Nízkofrekvenční (LF) fungují na 125 – 134 kHz a vysokofrekvenční (HF) pak na 13,56 MHz, což je i případ NFC v mobilních telefonech. Tyto frekvence jsou harmonizované, takže se používají stejně po celém světě.
Pak ještě existuje kategorie UHF, která běží na 860 – 960 MHz, což se používá v průmyslu a konkrétní frekvence závisí na zvyklostech v jednotlivých státech.

Běžná vzdálenost použití bezdrátových tagů je do jednoho metru. UHF umí fungovat až do 10 metrů, což se hodí ve skladech, kde může vysokozdvižný vozík projet bránou, která umí všechny označené výrobky třeba vyskladnit. Komunikační rychlosti se pak u LF pohybují mezi 2 a 8 kbit/s, v případě HF je to 100 – 900 kbit/s. Rychlost udává také to, s jak velkými daty můžeme pracovat.
Zatímco u LF se bavíme o desítkách či stovkách bajtů, u HF je to až 32 kB.
Pokud se vám podaří tag rozebrat, můžete si prohlédnout připojenou cívku. V případě LF tagů je potřeba mít vyšší indukčnost, takže cívka je velice hustá a složená z tenkých drátů. Obvykle okem jednotlivé dráty pouhým okem vůbec nerozeznáte.
Pokud rozeberete HF tag, bude mít cívka jen několik málo závitů vytvořených ze silnějších drátů.
RFID čipy se využívají velmi často v přístupových systémech. Nejjednodušší systém je takzvaný online, kdy se karta představí čtečce svým číslem a poté se v databázi vyhledají informace o tom, zda má daná karta přístup. V základním režimu řekne karta své ID komukoliv. Existují i sofistikovanější řešení, kdy se čtečka musí kartě autorizovat.
Druhý režim offline využívá toho, že na kartu je možné uložit nějaké informace. Můžete tam zapsat, že tato karta otevře pokoj číslo 42 od desátého do dvanáctého června.
S tím se můžete nejčastěji setkat v hotelích, kde se nevyplatí dotáhnout síť ke každým dveřím a levnější je pořídit chytřejší karty.
Nejjednodušší je dnes použít pro práci s NFC tagy běžný mobilní telefon. Existuje celá řada aplikací: NXP TagInfo, NXP TagWriter, MetroDroid, NFC Tools a další. Je také možné použít hotové zařízení, například Flipper Zero, který vznikl na Kickstarteru v roce 2020. Podpořilo to docela dost lidí, takže komunita kolem bude docela zajímavá.
Michal Hrušecký: Bezpečnost lokální sítě (nejen) s Turrisem
Většina uživatelů dnes řeší bezpečnost a chceme to i po zařízeních, která si kupujeme. Proto bychom měli dbát na to, aby dané zařízení bylo stále aktualizované, mělo by být otevřené a měli bychom mít na zařízení rootovský přístup. Zařízení by mělo být důvěryhodné a nemělo by dělat to, co nechceme.
Stále máme v sítích zařízení, která nemáme pod kontrolou, ale stále by měla být připojena do internetu. Taková zařízení musíme monitorovat a hlídat jejich chování.
Turris to dělá tak, že pomocí projektu Sentinel sleduje útoky z venčí pomocí honeypotu. Simuluje konkrétní služby a pokud se na ně útočník přihlásí, je zaznamenán a je mu zablokován přístup. Používáme dynamický firewall, takže umíme do sítě rozšířit informaci o IP adresách padouchů.
PaKon pak sleduje, co dělají zařízení místní v síti. Ne všem zařízením se dá věřit, občas si kupujeme čínská zařízení, která nás chvíli baví, ale nikdy se neaktualizují.
PaKon sbírá netflow z místní sítě, tedy kdo z lokální sítě komunikoval s kým venku. Sbírají se i další metadata jako DNS dotazy a TLS handshaky. Jsme hodní, takže to neukládáme do cloudu v Číně, ale ukládáme to jen do lokální databázi u vás v routeru.
Je možné tak sledovat, zda zařízení odesílají odpovídající množství dat, zda to dělají ve správnou dobu nebo zda komunikují s očekávanou protistranou.

Třetí projekt Turris MORCE pak je integrace s IDS (Intrusion Detection System). Snaží se dělat hloubkový průzkum provozu a odhalit v něm předem vytvořené vzorce. Když nástroj narazí na některý z těchto problémů, odešle se zpráva uživateli.
Základem tohoto konkrétního řešení v Turrisu je Snort 3, který umí při odhalení problému zavolat vlastní kód v jazyce Lua. Morče se pak postará o oznámení uživateli a zapsání do SQLite.
Jan Hrach: Softwarově definovaný radiolokátor
Radarů existuje více různých typů: meteoradar je monostatický, tedy vysílá a přijímá z jednoho místa. Zároveň je pulzní, takže měří pulzy odražené od překážek. Používá se klasická parabolická anténa, které mění azimut a elevaci a bývá zakrytá pod radomem. Obvykle se otáčí rychlostí pět až deset otáček za minutu a celé okolí proskenuje v průběhu několika minut.
Dosah radaru je obvykle 200 až 250 kilometrů, potom už je zakřivení Země tak výrazné, že signál nedohlédne do prostoru těsně nad povrchem.
Proč stavět vlastní meteoradar? Původně šlo hlavně o získání rychlých operativních dat, vykrývání mezer státních radarů v různých zemích a různé malé instalace. První verze byly lodní radary upravené pro sledování počasí. To je sice levné, ale nestandardní řešení, které odmítá výrobce podporovat. Proto bylo nakonec rozhodnuto o stavbě vlastního řešení.
Největším problémem je koncový stupeň, protože je potřeba vysílat průměrným výkonem v řádu stovek wattů. Jednou z variant je magnetron, což je elektronka oscilující na konkrétní frekvenci. Nelze tím vysílat různá data, magnetron je možné jen zapnout a vypnout.
Obvykle se jednu mikrosekundu vysílá a pak jednu milisekundu přijímá. Délka pulzu pak ovlivňuje rozlišení výsledného signálu. Pro takové nasazení je potřeba impuls o výkonu 300 kW. Provozovat něco takového je velmi složité a velmi drahé.
Druhou možností je pak zesílení na tranzistorovém koncovém stupni (SSPA, Solid State Power Amplifier). Je možné koupit hotové řešení, které obsahuje sério-paralelní zapojení VF tranzistorů z GaN. Tohle má výkon jenom 3 kW, což je stokrát méně než u magnetronu.
Tento rozdíl se řeší matematickým trikem: tímto způsobem je možné vysílat libovolný signál, takže lze vysílat pseudonáhodný signál (spread spectrum) a poté ji v přijímaném signálu hledat.

Z realizačního hlediska jde o poměrně ambiciózní projekt, protože nikdo podobné radary na počasí nestavěl. Nikdo nevěděl, jestli to takhle může fungovat. Pustili jsme se do velkého projektu, navíc ve velmi nejisté době.
Proto bylo rozhodnuto o stavbě minimálního funkčního produktu, u kterého by mělo být možné zjistit fatální problém co nejdříve. Pro první prototyp jsme se snažili co nejvíce komponent pořídit na běžném trhu.
Velká výhoda je také to, že i v případě nedostatku polovodičů bude na trhu vždy podobné zařízení.
Dalším problémem, který je potřeba řešit, je cesta vysokofrekvenčního signálu od vysílače do antény a pak z antény do přijímače. Koaxiální kabely jsou ověřené, ale jsou omezené přenášeným výkonem.
Proto byly zvoleny vlnovody a směrování signálu pomocí cirkulátoru. Anténu vyrobila specializovaná firma, která upravila anténu tak, aby měla vlnovodný vstup.
Posledním problémem je pořízení licence od ČTÚ. Každý si tady nemůže vysílat kilowattem do všech směrů.
Úřad nařídil osobní jednání a při něm se ukázalo, že se nejvíce bojí rušení od Wi-Fi. Pásmo je sdílené s Wi-Fi sítěmi a radary jsou přednostní uživatelé, takže ČTÚ musí řešit případné rušení.
ČTÚ nakonec vystavil experimentální licenci, která neopravňuje provozovatele k přednostnímu provozu. První verzi se pak podařilo spustit a skutečně se podařilo naměřit nějaká data, přestože zatím velmi nekvalitní.
Po vyřešení inženýrských problémů se ukázalo, že vše funguje, ale na snímcích byla stále spousta rušení, kvůli kterým byla data nepoužitelná. Jak chcete tohle debugovat?
Vznikla řada hypotéz: radar není možné provozovat u Prahy, problémem je špatná filtrace, vysílá se špatný signál nebo radar ruší sám sebe? RF kouzelníci a radaroví léčitelé krčili rameny, protože tohle nikdy neviděli.
Nakonec se ukázalo, že do příjmu zasahují pakety z Wi-Fi, které jsou násobně silnější než odražený signál. Pak už stačilo jen vytvořit klasifikátor, který pakety detekuje a z dat je vyhodí.
Výhodou celého řešení je, že veškerá technika je na zádech antény, takže není potřeba mít speciální technickou místnost. Dá se to umístit na příhradový stožár, věžičku na kontejner nebo výsuvnou věžičku.
Výhodou je, že takový radar je odolný proti nedostatku součástek. Daří se nám prorazit v průmyslu, protože jsem nevěděl, jak se radary staví, proto jsme je postavili se současnými technologiemi.
Petr Stehlík: Rodina Wi-Fi čipů ESP32
Firma Espressif Systems má poměrně dlouhou historii, už v roce 2014 vydala čip ESP8266. O dva roky vyšel jeho nástupce ESP32, který vyřešil řadu problémů. V posledních dvou letech vychrlili celou řadu nových čipů.
Většina čipů má přislíbenou dobu výroby 12 let, což není tak dlouho, jak to na první pohled vypadá. ESP8266 přestane být vyráběný za tři roky, takže nemá smysl na něm stavět žádné větší řešení.
Tento čip byl vymyšlen jako způsob, jak přidat k jinému zařízení Wi-Fi konektivitu.
ESP32 vyřešil mnoho neduhů svého předchůdce: software byl od začátku otevřený, přidal spoustu paměti, možnost připojený spousty periferií a podobně. Tohle dva roky fungovalo a lidé to používali.
V další verzi se firma snažila tlačit cenu dolů, proto se rozhodla odstranit jedno z procesorových jader, snížit množství paměti, odstranit podporu Bluetooth a naopak přidat USB. Tím vzniklo ESP32-S2, které používá koprocesor ULP s instrukční sadou RISC-V. Instrukční sada RISC-V je otevřená a bezlicenční, má navíc softwarovou podporu v Linuxu a FreeRTOS. Vzniká tu a roste rodina procesorů, ze kterých není potřeba nikomu platit licenční poplatky.

V další verzi ESP32 měl výrobce opět zájem snížit cenu a uvědomil si, že má velký úspěch s koprocesorem ULP a naopak se vrací k Bluetooth. Tím vznikl ESP32-C3, které má zpátky velké rozteče mezi pájecími body. Uvnitř je kompletně 32bitový procesor s instrukční sadou RISC-V, který je vybavený 400 kB RAM. Kromě toho je možné uvnitř vytvořit dvě izolovaná běhová prostředí pro programy běžící v chráněném režimu. U tohoto procesoru je také možné kompletně zašifrovat program, který umí procesor za běhu dešifrovat. Je to zřejmě nejlepší nástupce staré ESP8266.
Skutečným nástupcem v řadě S2 je pak ESP32-S3, který vrací druhé procesorové jádro a 512 kB RAM, zachovává USB a nově přidává instrukce pro neuronové sítě či strojové učení. Podpora nových instrukcí dramaticky zvyšuje například rychlost rozpoznávání obličeje. S vektorovými instrukcemi je tato úloha šestkrát rychlejší.
Od uživatelů je neustálý tlak na zlepšování standardu Wi-Fi, takže ESP32-C6 přichází s podporou Wi-Fi 6. To poznáme zejména v hodně zarušeném prostředí, například v panelákových bytech.
Zároveň je možné používat hluboké usínání a probouzet čip pomocí bezdrátové komunikace. To by mělo umožnit běh na baterie v délce několika let. Už se předpokládalo, že bude možné také používat 5 GHz Wi-Fi, ale zatím jsme jen na 2,4 GHz.
ESP32-H2 pak přidává podporu pro Zigbee.
Nejnovějším počinem je pak nečekaně vydané ESP32-C2, což je zase ořezaný model, který má jednojádrový procesor RISC-V, který běží na 120 MHz a má 272 kB RAM a 576 kB ROM. Dokázali vyrobit ekonomickou variantu v době, kdy je křemík nedostupný a je nutné vyrábět za co nejnižší ceny.
V kuloárech se mluví o ESP32-C5, který by měl mít konečně Wi-Fi v pásmu 5 GHz. Informace v angličtině teprve přijdou, výroba je plánovaná ale až na konec letošního nebo začátek příštího roku.
Radek Zajíc: Máte internet? A mohla bych ho vidět?
Internet je dnes možné mít skoro kdekoliv, pořád je ale ještě nemají všechny domácnosti. Podle aktuálních dat Českého statistického úřadu má připojení 83 % domácností, v rodinách s dětmi jsou to ale téměř všechny domácnosti. V době pandemie jsme se začali ptát: co je to vlastně internet?
Stačí nám současné parametry? Všichni mobilní operátoři se snaží své sítě zlepšit, ale stále máme řadu míst, kde není dostupný rychlý internet o rychlosti alespoň 100 Mbps ani přes jednoho operátora. Do těchto oblastí půjdou přednostně dotace pro zlepšení situace.
Nejpoužívanější metodou připojení domácnosti k internetu je Wi-Fi, kterou používá téměř třetina přípojek. Na druhém místě je pak optika a na třetím kabelové připojení. Dost populárním se stalo fixní LTE, kterým je dnes připojeno půl milionu uživatelů. Je to ale taková znouzectnost.
Ve spoustě případů byly ostatní technologie buď pomalé nebo úplně nedostupné. LTE ale není postaveno na tak velkou zátěž, takže z hlediska rychlostí patří LTE k nejpomalejšímu typu služeb. Operátoři už také příliš nechtějí prodávat další přípojky, takže se fixní LTE příliš nerozšiřuje.


Jaké jsou parametry připojení k internetu, které nás ve skutečnosti zajímají? Operátoři nás obvykle chtějí v marketingových materiálech ohromit rychlostí stahování. Dnes nás ale zajímají i další parametry.
Důležitá je například rychlost nahrávání, ale i stabilita připojení, latence, jitter a ztrátovost paketů. Pokud je ztrátovost vyšší než tři procenta, je linka pro TCP prakticky nepoužitelná.
Pak vás může zajímat také vlastní IPv4 adresa, dostupnost IPv6 konektivity a cena za pronájem zařízení pro připojení.
Jak zjistit, že je někde internet? Když jsem hledal nemovitost, zjišťoval jsem, jestli je někde centrální databáze dostupnosti připojení. Není.
Největší český portál s nemovitostmi dovoluje filtrovat, zda má dům sklep, ale ne zda je tam připojení k internetu. Od realitky se obvykle nedozvíte vůbec nic nebo získáte informaci, která není přesná.
Nejlepší je se ptát, nechat si ukázat přípojku a získané informace srovnejte.























 ČLÁNKY DO MAILU
ČLÁNKY DO MAILU