NASA má na ISS tři volně létající roboty Astrobee (vesmírná včela) s jmény Honey, Queen a Bumble. Jsou používáni pro rutinní úkoly na palubě a také k experimentům ve stavu beztíže.
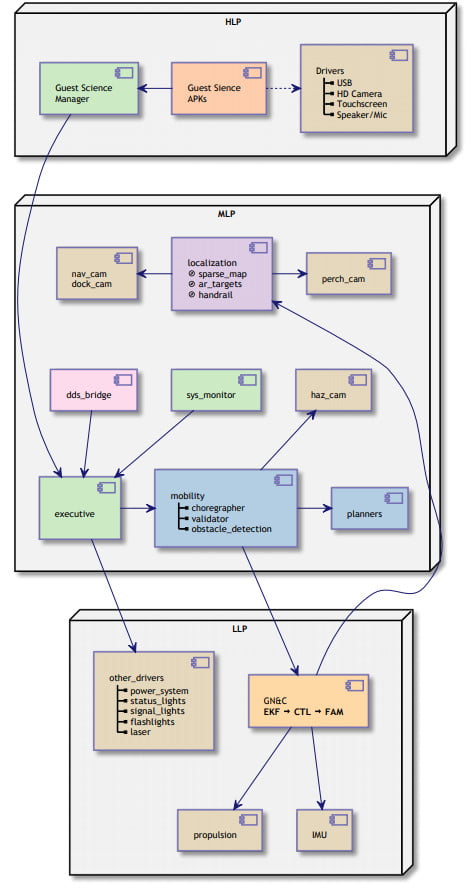
Každý robot je řízen třemi počítači s procesorem ARM. První z nich (High Level Processor) je Inforce 6601 a používá Android 7.1 k ovládání dotykové obrazovky, mikrofonu, reproduktoru a jedné kamery (SciCam).
Druhý počítač (Mid Level Processor) je Inforce 6501 a na něm Ubuntu/ROS (Robot Operating System), který ovládá čtyři kamery a je zodpovědný za určení polohy a detekování překážek.
Poslední počítač (Low Level Processor) je Wandboard a na něm opět Ubuntu/ROS. Ten ovládá motory ventilátorů a kontroluje stav baterie, případně vydá pokyn k návratu do nabíjecího doku. Více detailů v článku.
(zdroj: linuxgizmos)